I am a Robotics x CS student at the University of Michigan, dedicated to bridging the gap between high-level code and physical motion. My work sits at the intersection of autonomous systems, deep learning, and robust software architecture.
Beyond the code, I’m passionate about distilling complex concepts into intuition. Whether through tutoring or my work as an IA, I find as much fulfillment in debugging a peer’s logic as I do in optimizing a robot’s trajectory.
What I’m ENGINEERING

NiFT Autonomous Shuttle
Perot Jain TechLab at McityDelivering a proof-of-concept that transforms the NiFT Shuttle QB into an L4 autonomous vehicle, leveraging infrastructure-based sensing and routing protocols.
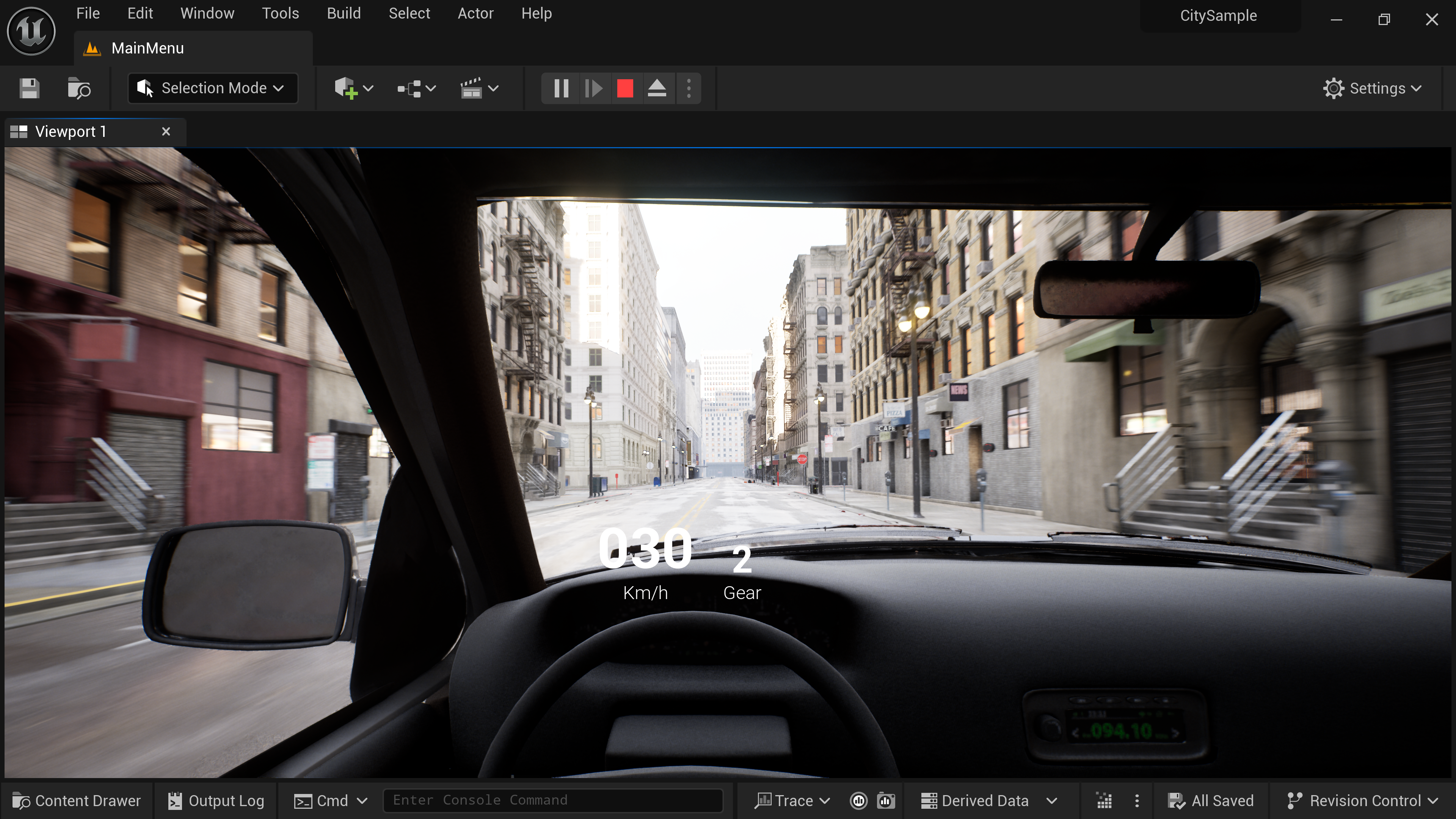
SIM-26 Driving Simulator
Multidisciplinary Design ProgramLeading development on an accessible driving simulator powered by Unreal Engine 5 to assist research on driver workload and distraction.
What I’m MENTORING

ROB 320 Instructional Aid
Helping lab sections, holding office hours, creating exam and grading on topics of Linux IPC, developing Robot Interprocess eXchange (RIX), and kinematics & transforms.
Math 115/116/215 Tutor
Delivering 10 hrs per week of drop-in and group tutoring for Calculus I-III at Math Learning Center, supporting 20–30 students with structured problem sets.
What I’m mastering
Introduction to Machine Learning
Foundations of Computer Vision
Introduction to Computer Organization
Tech Stacks
Ubuntu 22.04.5 LTS
C/C++, Python, Julia, MATLAB, R, Verilog, ARM_Assembly, Blueprint
nav2, tf2_ros, eigen, robot_localization, gazebo_sim, rviz2, fast_dds
Package Version
------- -------
torch 2.2.0
opencv-python 4.9.0
scikit-learn 1.4.1
scipy 1.12.0
numpy 1.26.4
matplotlib 3.10.6
pandas 2.2.1
docker git cmake gdb valgrind
Explore More
Check out my other past projects, my highlighted courseworks, and my work experiences: