
EECS 504 Course Projects
Graduate Winter 2026 Upper Level Electives Grade: A
EECS 504: Foundations of Computer Vision provides a graduate-level foundation in computer vision by treating image analysis as a series of optimization problems, focusing on the mathematical modeling of visual invariants, feature extraction, and estimation techniques like camera calibration and stereo reconstruction.
Topic 1: Foundations of Mathematical Vision
This section covers the transition from raw pixels to structured geometric information. Through a series of high-level problem sets, I implemented the mathematical first principles of vision—including homography estimation, scale-space theory, and the statistical foundations of pattern recognition.
Project #1: Geometry, Filtering & Demosaicking
- Objective: Implementing core vision algorithms including homography-based projection, Bayer pattern reconstruction, and proving the rotation invariance of the Difference of Gaussians (DoG) operator.
- Build: Developed a Linear Least Squares solver to estimate $3 \times 3$ homography matrices for image registration and authored a bilinear interpolation engine for Bayer Demosaicking to reconstruct full-color images from raw sensor data.
- Functionality: Applied homography estimation to project virtual NFL-style "magic yellow lines" onto a football field with perspective correctness and achieved high-fidelity reconstruction of the "Orion" sculpture from mosaicked gray-scale inputs.
Project #2: Local Features, Scale Space & PCA
- Objective: Extracting robust, scale-invariant features from images and implementing a statistical learning pipeline for digit classification.
- Build: Architected a Harris Corner Detector using structure tensor eigenvalues and a Difference of Gaussians (DoG) scale-space pyramid. Developed a dimensionality reduction engine using Principal Component Analysis (PCA) to extract the most descriptive eigenvectors from the MNIST dataset.
- Functionality: Performed multi-scale blob detection on biological and natural imagery (Drosophila, Sunflowers) and implemented a panoramic stitching pipeline using ORB features. Achieved high-accuracy digit classification ($>90\%$) by combining the PCA-reduced feature basis with a K-Nearest Neighbors (KNN) classifier.
Project #3: Image Segmentation & Graph Cuts
- Objective: Formulating image segmentation as a graph partitioning problem to extract distinct foreground objects using energy minimization and spanning forest algorithms.
- Build: Engineered a discrete Potts model to calculate the Mumford-Shah energy function and implemented a max-flow/min-cut pipeline built on top of SLIC superpixels and color histogram features. Developed a multi-object segmentation engine using the Felzenszwalb-Huttenlocher (F-H) algorithm.
- Functionality: Successfully isolated complex foreground objects from noisy backgrounds by computing optimized adjacency and capacity matrices. Applied edge-filtering post-processing to merge small, uneven components, achieving clean, multi-region graph partitions.
Topic 2: Research & Advanced Applications
The capstone of the course involves translating academic research into functional software. Working in a small research group, this project focuses on locating state-of-the-art methods in literature and developing a custom solution for a novel computer vision challenge.
Final Project: RapidGeoStitch (Disaster Response Orthomosaics)
- Objective: Developing a real-time aerial mapping and analysis system that converts low-altitude drone imagery into a single metric-scaled orthomosaic to aid search-and-rescue teams in disaster zones.
- Build: Engineered a four-stage pipeline utilizing SIFT keypoints and RANSAC-estimated homographies to construct a global spanning-tree pose graph for image stitching. Integrated a fine-tuned YOLOv8m model using a tiled sliding-window approach for disaster detection, refined by a custom classical computer vision segmenter (GrabCut, Otsu thresholding, morphological operations). Ground Sampling Distance (GSD) was calculated using EXIF metadata with a Depth Anything V2 fallback.
- Functionality: Delivered a comprehensive application suite (OpenCV live view, batch orchestrator, Streamlit browser) that dynamically stitches sequences of drone images into a unified map. Successfully overlaid color-coded disaster masks (floods, building damage, blocked roads, vehicles) and enabled responders to estimate real-world ground distances directly from the aerial image using an interactive two-click measurement tool.
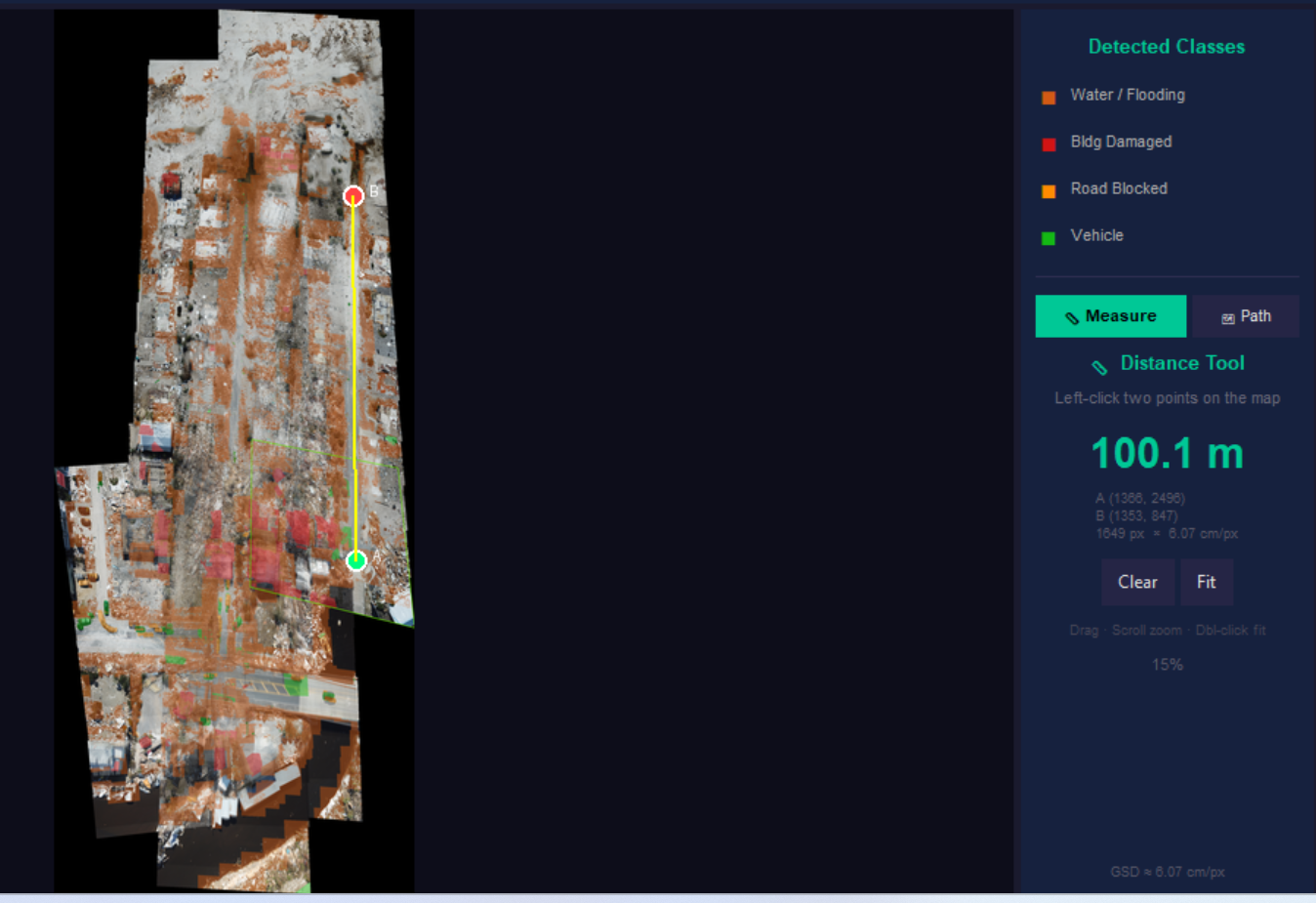 Final Output of the system
Final Output of the system